Силы, действующие на корпус судна. Теоретические основы управления судном Силы и моменты, связанные с воздействием ветра
При прямолинейном равномерном движении на судно действуют две равные по величине и противоположно направленные силы: сила упора движителей (движущая сила) F Д и сила сопротивления R .
F Д = R; a= 0
При неустановившемся прямолинейном движении к этим двум силам добавляется сила инерции, компенсирующая алгебраическую разность этих сил.
При ускоренном движении судна, когда движущая сила F Д больше силы R , сила инерции выступает в роли сопротивления, а при замедленном движении, когда движущая сила F Д меньше силы сопротивления R , - в роли движущей силы.
F Д > R ; F Д < R; a 0 .
6.1.2. Характеристики сил, действующих на судно при криволинейном движении.
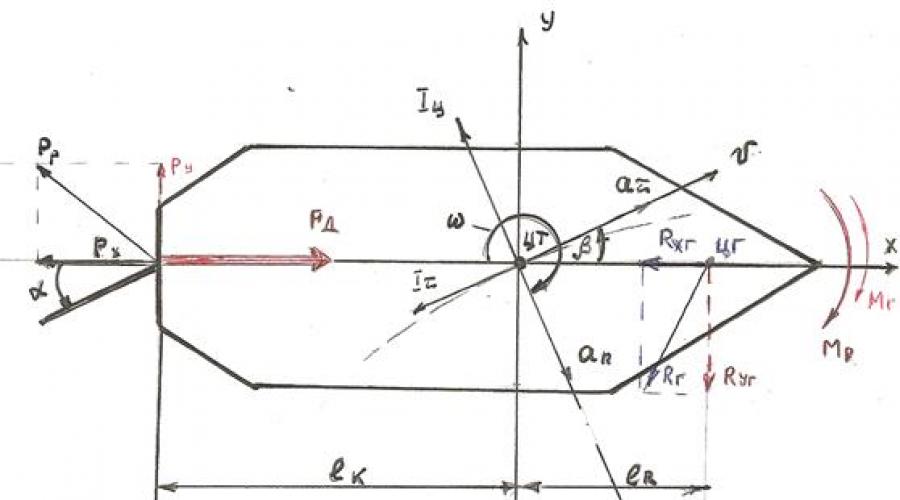
Криволинейное движение судна осуществляется с помощью соответствующей перекладки руля или поворотной накладки. При этом на руле возникает гидродинамическая сила руля Р р (рис. 6.1), которую можно разложить на продольную Р х , направленную параллельно диаметральной плоскости, и боковую (рулевую) Р у – перпендикулярную ей. Первая увеличивает силу сопротивления и тем самым уменьшает скорость движения судна, вторая – вызывает боковое перемещение судна в сторону своего действия и, кроме того, образует момент относительно центра тяжести (ЦТ), который осуществляет первоначальный поворот судна с угловой скоростью ω 1.
М р = Р у L к (6.1)
Р х = Р р · Cosα
Р у = Р р · Sinα
где Р у – составляющая гидродинамической силы руля по оси У;
L к - расстояние (плечо) от ЦТ до точки приложения силы Р р;
α – угол перекладки руля.
Наличие бокового перемещения судна вызывает отклонение его вектора скорости V от ДП на угол дрейфа β (рис.6.1).
Угол дрейфа при криволинейном движении (β) есть угол между ДП судна и вектором линейной скорости его в данной точке криволинейного движения.
Боковое перемещение судна и поворот нарушают симметричность обтекания подводной части корпуса судна, и на нем возникает гидродинамическая сила R Г , направленная под определенным углом к диаметральной плоскости судна. Эту силу можно разложить на две составляющие: боковую R УГ (рис. 6.1) и
продольную R ХГ . Сила R УГ направлена в сторону, обратную силе Р У , и, кроме того, создает вращающий момент относительно центра тяжести судна М Г.

Рис.6.1 Силы, действующей на судно при криволинейном движении.
М Г = R УГ L R (6.2)
R ХГ = R Г · Cosδ
R УГ = R Г · Sinδ
где R УГ – составляющая гидродинамической силы по оси У;
L R – расстояние (плечо) от центра приложения гидродинамических сил (ЦГ) до ЦТ.
δ - угол между ДП и направлением действия гидродинамической силы Р Г.
Момент М Г также осуществляет поворот судна с угловой скоростью ω 2. Моменты М Р и М Г в данном случае совпадают и создают суммарный поворачивающий момент М П, который будет осуществлять поворот судна с угловой скорость ω.
М П является алгебраической суммой моментов М Р и М Г
М П = М Р + М Г (6.3)
Составляющая R Х представляет собой силу, препятствующую движению судна.
По истечении некоторого времени после перекладки руля судно опишет криволинейную траекторию. При этом, как и у любого твердого тела, у него возникнут два ускорения: нормальное а п (центростремительное), направленное к центру кривизны траектории, и касательное а τ , совпадающее с линией вектора скорости V . При этом на судно будут действовать соответствующие силы инерции. Сила инерции I Ц (рис. 6.1), вызванная появлением нормального ускорения, будет пропорциональна этому ускорению и направлена в противоположную сторону. Она носит название центробежной силы инерции. Сила инерции I τ , вызванная касательным ускорением, направлена в сторону, обратную этому ускорению.
Центробежная сила инерции I Ц будет действовать все время, пока судно движется по кривой, а сила I τ – только при изменении скорости движения (на установившейся циркуляции, когда скорость движения постоянна этой силы не будет).
ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА
Силы и моменты, действующие на судно.
Система уравнений движения судна в
Горизонтальной плоскости.
Маневренные характеристики судна.
Требования к содержанию информации о
Маневренных характеристиках судна.
Общие сведения об инерционно-тормозных
Свойствах судна.
7. Особенности реверсирования различных видов
Движительных установок судов.
Торможение судна.
Судно как объект управления.
Транспортное морское судно совершает движение на границе двух сред: воды и воздуха, испытывая при этом гидродинамические и аэродинамические воздействия.
Для достижения заданных параметров движения, судном необходимо управлять. В этом смысле судно является управляемой системой . Каждая управляемая система состоит из трех частей: объекта управления, средства управления и управляющего устройства (автомата или человека)
Управление – это такая организация процесса, которая обеспечивает достижение определенной цели, соответствующей задаче управления.
При плавании судна в открытом море, задача управления заключается в обеспечении его перехода из одной точки в другую по прямолинейной траектории, удерживая заданный курс и периодически корректируя его после получения обсерваций. В этом случае курс является управляемой координатой, а процесс поддержания его постоянного значения является целью управления.
Мгновенное значение ряда координат определяет состояние судна в данный момент. Такими координатами являются: курс, скорость, угол дрейфа, поперечное смещение относительно генерального курса и т.п. Они являются выходными координатами . В отличие от них координаты, являющиеся причинами управляемого движения, называются входными . Это угол перекладки руля и частота вращения гребного винта . При выборе значений входных координат, управляющее устройство (авторулевой, судоводитель), руководствуются значениями выходных координат. Такая связь между следствием и причиной называется обратной связью.
Рассмотренная управляемая система является замкнутой, т.к. в ней действует управляющее устройство (судоводитель). Если же управляющее устройство перестанет функционировать, то система становится разомкнутой и поведение объекта управления (судна) будет определяться тем состоянием, в котором зафиксированы средства управления (угол перекладки руля, частота и направление вращения гребного винта).
В дисциплине «Управление судном» изучаются задачи управления судном, движение которого происходит в непосредственной близости от препятствий, т.е. на расстояниях, сопоставимых с размерами самого объекта управления, что исключает возможность рассматривать его как точку (например, как в курсе «Навигация»).
Силы и моменты, действующие на судно
Все силы, действующие на судно, принято разделять на три группы: движущие, внешние и реактивные .
К движущим относят силы, создаваемые средствами управления для придания судну линейного и углового движения. К таким силам относятся: упор гребного винта, боковая сила руля, силы, создаваемые средствами активного управления (САУ) и т.п.
К внешним относятся силы давления ветра, волнения моря, течения. Эти силы в большинстве случаев создают помехи при маневрировании.
К реактивным относятся силы и моменты, возникающие в результате движения судна . Реактивные силы зависят от линейных и угловых скоростей судна. По своей природе реактивные силы и моменты разделяются на инерционные и неинерционные . Инерционные силы и моменты обусловлены инертностью судна и присоединенных масс жидкости. Эти силы возникают только при наличии ускорений – линейного, углового, центростремительного. Инерционная сила всегда направлена в сторону, противоположную ускорению . При равномерном прямолинейном движении судна инерционные силы не возникают.
Неинерционные силы и их моменты обусловлены вязкостью забортной воды, следовательно, являются гидродинамическими силами и моментами. При рассмотрении задач управляемости используется связанная с судном подвижная система координат с началом в его центре тяжести. Положительное направление осей: Х – в нос; Y – в сторону правого борта; Z – вниз. Положительный отсчет углов принимается по часовой стрелке, однако, с оговорками в отношении угла перекладки, угла дрейфа и курсового угла ветра.
За положительное направление перекладки руля принимают перекладку, вызывающую циркуляцию по часовой стрелке, т.е. перекладку на правый борт (перо руля разворачивается при этом против часовой стрелки).
За положительный угол дрейфа принимается такой, при котором поток воды набегает со стороны левого борта и, следовательно, создает положительную поперечную гидродинамическую силу на корпусе судна. Такой угол дрейфа возникает на правой циркуляции судна.
Общий случай движения судна описывается системой из трех дифференциальных уравнений: двух уравнений сил по продольной Х и поперечной Y осям и уравнением моментов вокруг вертикальной оси Z.
Все силы, действующие на судно, по принятой в настоящее время классификации разделяются на три группы: движущие, внешние и реактивные.
К движущим относят силы, создаваемые средствами управления с целью придания судну требуемого линейного и углового движения. К таким силам относятся упор гребного винта, боковая сила руля, силы, создаваемые САУ, и т. п.
К внешним относятся силы давления ветра, волнения моря, течения. Эти силы, обусловленные внешними источниками энергии, в большинстве случаев создают помехи при маневрировании.
К реактивным относятся силы и моменты, возникающие в результате движения судна под действием движущих и внешних сил. Реактивные силы зависят от линейных и угловых скоростей.
По своей природе реактивные силы и моменты разделяются на инерционные и неинерционные.
Инерционные силы и моменты обусловлены инертностью судна и присоединенных масс жидкости. Эти силы возникают только при наличии ускорений - линейного, углового, центростремительного.
Инерционная сила всегда направлена в сторону, противоположную ускорению. При равномерном прямолинейном движении судна инерционные силы не возникают.
Неинерционные силы и их моменты обусловлены вязкостью забортной воды, следовательно, являются гидродинамическими силами и моментами. При рассмотрении задач управляемости обычно, как уже отмечалось, используется связанная с судном подвижная система координат с началом в ц. т.(тG) Положительное направление осей: X - в нос; Y- в сторону правого борта; Z - вниз. Положительный отсчет углов принимается по часовой стрелке, однако с оговорками в отношении угла перекладки, угла дрейфа и курсового угла ветра.
За положительное направление перекладки руля принимают перекладку, вызывающую циркуляцию по часовой стрелке, т. е. перекладку на правый борт (перо руля при этом разворачивается против часовой стрелки).
За положительный угол дрейфа принимается такой, при котором поток воды набегает со стороны левого борта и, следовательно, создает положительную поперечную гидродинамическую силу на корпусе. Такой угол дрейфа возникает на правой циркуляции судна.
Общий случай движения судна описывается системой из трех дифференциальных уравнений движения: двух уравнений сил - по продольной X и поперечной Y осям и уравнения моментов вокруг вертикальной оси Z.
Эта система в несколько упрощенном варианте имеет вид:
![]()
где m – масса судна
λ 11 – присоединенные массы при движении по оси X;
λ 22 - присоединенные массы при движении по оси Y;
V X – проекция скорости судна на ось X;
V Y - проекция скорости судна на ось Y;
ω - угловая скорость судна;
J - момент инерции судна относительно оси Z;
R X – продольная гидродинамическая сила на корпусе;
R Y – поперечная гидродинамическая сила на корпусе;
P E – полезная сила упора винта;
P PX – продольная сила давления воды на руль;
P PY – поперечная сила руля;
A X – продольная аэродинамическая сила;
A Y – поперечная аэродинамическая сила;
M R – момент гидродинамической силы на корпусе;
M A – момент аэродинамической силы;
M P – момент поперечной силы руля.
Первое уравнение системы характеризует движение судна по оси «X» при разгоне и торможении, поэтому его решение позволяют оценивать инерционно-тормозные характеристики судна. Второе уравнение описывает закономерности поперечного смещения судна. Третье уравнение, характеризующее угловое движение, используется при оценки управляемости судов. Из данной системы видно, что при равномерном и прямолинейном движении судна, левые части уравнений будут равны нулю, а поперечного движения не будет. Исходя из этого система уравнений примет вид:
P e = R X + A X + P PX
 G
G
P PX P e A X R X
Рис.5.5. Силы, действующие на судно при прямолинейном движении.
5.4 Силы возникающие от работы винта.
Гидромеханическое взаимодействие системы корпус - винт - руль очень сложно. Движитель, работающий вблизи корпуса судна, существенно изменяет его поле скоростей, что приводит к изменению гидродинамических сил, действующих на корпус. В свою очередь, поток воды, набегающий на винт, получает возмущения от корпуса перемещающегося корабля. Существенное влияние винт так же оказывает на расположенный позади него руль. В результате взаимодействия системы корпус - винт - руль. возникает целый ряд боковых сил, которые необходимо постоянно учитывать и рационально использовать при управлении маневрами судна.
Сила попутного потока.
Движущийся в воде корпус вызывает попутный поток, направленный в сторону движения судна. Причины его появления - трение пограничных слоев воды о корпус судна и стремление масс воды заполнить объем, вытесненный корпусом. Между скоростью попутного потока в месте расположения винта V p и скоростью хода судна V существует соотношение V p = V (1-ω), где ω - коэффициент попутного потока. Его значения для различных судов могут изменяться от 0,10 до 1,00. Таким образом, влияние корпуса на винт сводится к уменьшению скорости обтекания винта.

Рис.5.6. Сила попутного потока
Экспериментально установлено, что в верхней половине диска винта скорость попутного потока больше, чем в нижней. Неравномерность поля скоростей попутного потока в диске винта за один оборот вызывает изменение угла атаки и соответственно сил упора и момента на лопастях, проходящих верхнее и нижнее положения. Так, лопасть, находящаяся в верхнем положении, будет иметь больший угол атаки и соответственно большее сопротивление вращению, чем лопасть, находящаяся в нижнем положении. В результате возникает боковая сила, которая на переднем установившемся ходу (винт правого вращения) будет уклонять корму судна влево.
Сила попутного потока b проявляет себя в наибольшей степени на переднем установившемся ходу, вызывая уклонение кормы судна в сторону, обратную вращению винта.
Сила реакции.
Лопасти гребного винта, проходящие верхнее положение, находятся значительно ближе к поверхности воды, чем лопасти,проходящие нижнее положение. В результате этогопроисходит засасывание воздуха в верхние слои воды, чтозначительно изменяет силовые характеристики лопасти(упор и момент).
Влияние близости поверхности воды наиболее существенно проявляется при малом заглублении винта (у транспортныхсудов, следующих в балласте, лопасть в верхнем -положении вообще выходит из воды), в период неустановившегося движения (дача хода со «стопа»), при реверсах. Разность упора и момента на верхней и нижней лопастяx, приводит к образованию боковой силы реакции D. На установившемся ходу и с увеличением заглубления винта действие силы реакции резко уменьшается.

Рис.5.6. Действие силы реакции D.
В 1-м секторе лопасть, переходя из положения 1 в положение 2, встречает сопротивление воды, сила реакциикоторой будет направлена вначале справаналево (сила Д 1 ,а затем снизу вверх (сила Д 2); последняя на диаметральнуюплоскость судна не влияет, но дает вибрацию кормы.
Во 2-м секторе лопасть, переходяиз положения 2 в положение 3, встречает сопротивление воды, сила реакции которой направлена сначала снизу вверх (сила Д 2), а затем лопастьбудет преодолевать силу реакции достаточно плотных слоев воды (сила Д 3), направленную слева направо и значительно большую, чем сила Д 1 . Следовательно, корма судна будет отклоняться вправо, а нос - влево.
, встречает сопротивление воды, сила реакции которой будет направлена вначале слева направо (сила Д 3), а затем лопасть будет преодолевать силу реакции Д 4 , направленную сверху вниз. На диаметральную плоскость судна эта сила не влияет, но дает вибрацию кормы.
в положение 1, встречает сопротивление воды, сила реакции которой направлена вначале сверху вниз (сила Д 4 ), а затем лопасть будет преодолевать силу реакции менее плотных слоев воды (сила Д 1), направленную справа налево, значительно меньшую, чем сила Д 3 . Следовательно, корма судна будет отклоняться вправо, а нос - влево.
Сила реакции D проявляется в наибольшей степени в период неустановившегося движения, вызывая уклонение кормы в сторону вращения винта.
Сила набрасываемой струи.
Гребной винт при вращении закручивает прилегающие к лопастям массы воды и отбрасывает их, образуя мощный спиральный поток. При движении судна вперед этот поток воздействует на расположенный позади винта руль. При движении задним ходом поток воздействует на кормовой подзор судна. Образованный винтом спиральный поток можно представить в осевой (аксиальной) и касательной (тангенциальной) составляющих. Аксиальная составляющая, воздействуя на расположенный за винтом руль, значительно повышает его эффективность и никаких боковых сил не вызывает. При движении судна задним ходом аксиальная составляющая, воздействуя на симметричные обводы кормы, также никаких боковых сил не вызывает.
Тангенциальная составляющая на переднем ходу воздействует на перо руля в левой верхней и правой нижней половинах.
Из-за несимметричности распределения попутного потока по осадке судна, а следовательно, и вызванных окружных скоростей в потоке, натекающем на руль, воздействие тангенциальной составляющей на правую нижнюю половину руля будет больше, чем на левую верхнюю. В результате возникает боковая сила набрасываемой струи С.

Рис.5.7. Действие силы С
В 1-м секторе лопасть, переходя из положения 1 в положение 2, отбрасывает слои воды в сторону от судна, и никакой силы набрасывания струи не образуется.
Во 2-м секторе лопасть, переходя из положения 2 в положение 3, набрасывает слои воды на нижнюю поверхность руля, где плотность воды значительно больше.. Руль должен был бы иметь стремление отклониться влево, но поскольку он установлен в диаметральной плоскости судна, сила набрасываемой струи устремляется на всю корму судна и отводит корму судна влево, а следовательно, нос идет вправо. Обозначим эту силу через С 1 .
В 3-м секторе лопасть, переходя из положения 3 в положение 4, будет отбрасывать слои воды от судна, следовательно, никакой силы набрасывания струи не будет.
В 4-м секторе лопасть, переходя из положения 4 в положение 1, набрасывает снова слои воды, но уже с другой стороны, нежели во 2-м секторе, и на верхнюю часть руля. Обозначим эту силу набрасывания струи С 2 . Действие этой силы будет меньше, чем действие силы набрасывания струи С 1 во 2-м секторе, вследствие меньшей плотности воды. Отсюда следует вывод: винт правого вращения на установившемся переднем ходу, действуя на руль, отклоняет корму судна влево, а нос - вправо
По данной тематике проводится лабораторная работа 2.1 (2 часа)
При движении судна прямолинейным курсом и положении руля в диаметральной плоскости, при отсутствии ветра и течения, сила упора движителей уравновешивается силами сопротивления воды движению корпуса судна. Руль и корпус симметрично обтекают встречные струи воды и сил отклоняющих судно не возникает. При перекладке руля на некоторый угол α , со стороны обращенной к обтекающему потоку, на руле возникает повышенное давление, а на противоположной стороне руля – пониженное. Разность давлений на сторонах пера руля создает силу Р, давящую на перо руля и зависящую от скорости натекания воды на перо руля, угла перекладки, формы и площади пера руля. После перекладки руля судно некоторое время, по инерции, продолжает двигаться прямолинейно, а затем поворачивается в сторону перекладки руля. Рассмотрим действие силы Р на судно в первый момент после перекладки руля.
Разложим силу Р по правилу параллелограмма на две составляющие силы: Ру – перпендикулярную ДП судна рулевую силу , и Рх – направленную по ДП силу торможения. Приложим к ЦТ судна две равные и противоположно направленные силы Р 1 и Р 2 , параллельные и равные силе Ру. Силы Ру и Р 2 образуют пару сил, а их поворачивающий момент Мр наз. моментом руля Мр = Ру 0,5L где 0,5L – плечо пары сил Ру и Р 2 . Сила Ру при движении прямым курсом определяют по формуле:
Ру = k 1 k 2 с р 0,5рSр(k υ υ) 2 (α+β с) где:
k 1 – коэф., учитывающий увеличение рулевой силы от постановки рулевых шайб(1,15-1,2);
k 2 – коэф., учитывающий влияние близости пера руля к корпусу судна (1,05- 1,3 при меньшем зазоре, больший коэффициент);
с р – угловой коэф. 5,15/1+(2S р / h р 2) где h р -высота пера руля,м;
ρ- массовая плотность воды (для пресной воды 102 кгс с 2 /м 4);
Sр – площадь пера руля,м 2 ;
k υ – коэф. учитывающий изменение скорости натекания воды на перо руля, от действия гребного винта и корпуса судна (1,1-1,55, больше при толкании, меньше для одиночных судов);
υ – скорость натекания воды на перо руля, м/с;
α – угол перекладки руля, град;
β с – угол скоса потока воды за кормой, вызванного обводами судна. (у одно и трех винтовых судов β с = 2-4 0 , у двухвинтовых с 2-мя рулями β с =0 0).


Из рисунка видно, что при перекладке руля на судно начинают действовать: поворачивающий момент Мр , направленный в сторону отклонения пера руля; сила Ру , смещающая судно в сторону противоположную повороту и сила Рх , увеличивающая сопротивление движению. Увеличение сопротивления при перекладке руля уменьшает скорость движения судна (при прямолинейном движении и удержании судна на курсе 5-ти градусными перекладками руля, теряется до 2% скорости), поэтому перекладка руля не должна превышать 1 0 .
Смещение и дрейф судна в сторону противоположную повороту руля, достигает наибольшего значения в кормовой части судна, что следует учитывать при выполнении поворотов и оборотов вблизи опасностей.
После преодоления сил инерции судно начинает двигаться по криволинейной траектории – циркуляции. В это время на судно, как на всякое физическое тело, движущееся по кривой, действует центробежная сила С , направленная в сторону противоположную повороту. Она приложена к центру тяжести судна, пропорциональна его массе m , квадрату скорости υ с поступательного движения ии обратно пропорциональна радиусу кривизны траектории движения r . С=mυ с 2 /r .
Эта сила с плечом h (расстояние между ц.т. и центром величины судна) создает кренящий момент Мкр = Сh, вызывающий крен судна в сторонупротивоположную повороту судна, что также следует учитывать привыполнении резкого поворота и оборота (снижать скорость и угол перекладки руля). Циркуляция, ее периоды и элементы см. выше.После остановки движителей давление воды на перо руля резко уменьшается. С уменьшением скорости судно хуже слушается руля и может потерять управляемость . При работе винта «назад» на стороне руля обращенной к винту, создается пониженное давление, поэтому при руле переложенном «вправо» нос судна уклоняется влево и наоборот, т.е. корма судна уклоняется в сторону перекладки руля.


 Сила давления на перо руля при движении задним ходом в первый момент определяется по формуле: Ру = с у 0,5S ρ υ 2
, рассмотрим действие силы Р
на судно придвижении задним ходом. Отклонение руля вызывает поворачивающий момент от пары сил Р и Р 1
, увеличение сопротивлению воды движению корпуса судна и уменьшение скорости от действия силы Р х
, и дрейф судна в сторону перекладки руля. При циркуляции на заднем ходу под действием рулевой силы увеличивается давление воды на кормовую часть борта (сила R 1 у)
, в сторону которого переложен руль. Эта сила создает поворачивающий момент, противоположный поворачивающему моменту руля и общий поворачивающий момент в начальный момент циркуляции на заднем ходу равен разнице моментов рулевого и сопротивления воды корпусу судна. Поэтому даже при равном давлении на руль поворотливость на переднем ходу лучше, чем на заднем. Однако, через некоторое время после начала поворота угловая скорость начинает увеличиваться и гидродинамические силы со стороны наружного борта становятся больше динамической силы R 1 у
, вызванной перекладкой руля. В это время поворачивающий момент судна – сумма момента руля и позиционного момента, что вызывает увеличение скорости поворота. Величина позиционного момента близка к величине момента руля, поэтому перекладка руля в противоположную сторону может не дать желаемого эффекта и не выведет судна из циркуляции. Учитывая это явление, при движении задним ходом не следует допускать больших скоростей поворота и движения.
Для вывода судна из циркуляции следует дать реверс «вперед» и управлять судном на переднем ходу.
Сила давления на перо руля при движении задним ходом в первый момент определяется по формуле: Ру = с у 0,5S ρ υ 2
, рассмотрим действие силы Р
на судно придвижении задним ходом. Отклонение руля вызывает поворачивающий момент от пары сил Р и Р 1
, увеличение сопротивлению воды движению корпуса судна и уменьшение скорости от действия силы Р х
, и дрейф судна в сторону перекладки руля. При циркуляции на заднем ходу под действием рулевой силы увеличивается давление воды на кормовую часть борта (сила R 1 у)
, в сторону которого переложен руль. Эта сила создает поворачивающий момент, противоположный поворачивающему моменту руля и общий поворачивающий момент в начальный момент циркуляции на заднем ходу равен разнице моментов рулевого и сопротивления воды корпусу судна. Поэтому даже при равном давлении на руль поворотливость на переднем ходу лучше, чем на заднем. Однако, через некоторое время после начала поворота угловая скорость начинает увеличиваться и гидродинамические силы со стороны наружного борта становятся больше динамической силы R 1 у
, вызванной перекладкой руля. В это время поворачивающий момент судна – сумма момента руля и позиционного момента, что вызывает увеличение скорости поворота. Величина позиционного момента близка к величине момента руля, поэтому перекладка руля в противоположную сторону может не дать желаемого эффекта и не выведет судна из циркуляции. Учитывая это явление, при движении задним ходом не следует допускать больших скоростей поворота и движения.
Для вывода судна из циркуляции следует дать реверс «вперед» и управлять судном на переднем ходу.
Воздействие ветра и течения на судно вызывает основную нагрузку на якорную цепь при стоянке и определяет статический момент сопротивления на валу электродвигателя в процессе съемки с якоря, когда судно подтягивается к месту заложения якоря.
На стоянке при совпадении по направлению ветра и течения возникает наибольшее воздействие внешних сил на судно и обобщенная сила для винтовых судов определяется арифметической суммой трех составляющих
F’ = FB + F’T + F’Г
где FB - сила ветрового воздействия на надводную часть судна;
F’T – сила течения действующая на подводную часть судна;
F’Г - сила течения действующая на неподвижные винты.
Сила ветрового воздействия на надводную часть судна FB зависит от скорости и направления ветра, формы надводной части корпуса, размеров и расположения надстроек. Расчетное значение усилия от ветра можно определить по формуле, Н
FB = Кн ∙ рв ∙ Sн
где Кн = 0,5 ÷ 0,8 – коэффициент обтекания надводной части корпуса
рв = ρV2 / 2 – давление ветра, Па;
ρ = 1,29 – плотность воздуха, кг/м3;
V – скорость ветра, м/с
рв =1,29*102/2=64,5Па
Площадь проекции надводной части судна на миделевое сечение, м2:
B – ширина судна, м;
H – высота борта, м;
T – осадка, м;
b, h – соответственно ширина и высота судовых надстроек, м.
Sн=11,6*(3,5-2,5)+11*2,5+10,5*5=91,6 м2
FB=0,5*64,5*91,6=2954,1 Н
Сопротивление корпуса, обусловленное течением, учитывается только сопротивлением трения, так как все другие виды сопротивления (волновое, вихревое) практически отсутствуют вследствие малой скорости течения, Н
![]() (1)
(1)
где КТ = 1,4 – коэффициент трения;
Sсм = L∙(δ∙B + 1,7∙T)
– площадь смачиваемой поверхности судна, м2
Здесь δ = 0,75 ÷ 0,85 – коэффициент полноты водоизмещения;
L, B, T – главные размерения судна, м;
Sсм=78*(0,84*11,6+1,7*2,5)=1055,34 м2
VT – скорость течения воды, м/с.(1,38м/с)
F’T=1,4*1055,34*1,381,83=2663,7 Н
![]() (2)
(2)
где ZГ – число гребных винтов;
CГ = 200 ÷ 300 – параметр, увеличивающийся с возрастанием дискового отношения гребного винта, кг/м3;
DВ – наружный диаметр гребного винта (насадки), м.
F’Г=2*200*1,52*1,382=1713,96 Н
F’=2954,1+2663,7+1713,96=7331,96 Н
Биогаз
Представляет собой смесь метана и углекислого газа и является продуктом метанового брожения органических веществ растительного и животного происхождения. Биогаз относится к топливам, получаемым из местного сырья. Хотя потенциальных источников для его производства достаточно много, на практике круг их сужается вследствие географических, к...
Определение приводных усилий в дисковом тормозном механизме
Рисунок 3.2 - Расчетная схема дискового тормоза r1 - внутренний радиус тормозного диска, м; r2 - наружный радиус тормозного диска, м; rср - средний радиус рабочей поверхности, м; dрц - диаметр рабочего цилиндра, м. Тормозные накладки выполнены в форме кольцевого сектора. Принимаем Момент трения дискового тормоза с кольцевой накладкой, Н...
Расчёт на отрыв гребня
Рисунок 8 – К расчету замка на прочность. Считаем, что лопатки расположены параллельно, т. е. b=0°. Rц.т.об. – радиус центра тяжести обода. Рц.об. – центробежная сила, действующая на обод. σраст. – растягивающее напряжение, действующее на гребень. Rц.т.об. = 0,296 м. Вывод: Рассчитанные значения напряжений смятия и растяжения не пре...